FABRIK: Inverse Kinematics with interactive constraints Sebastian Eduardo Chaparro 2:00 7 years ago 309 Далее Скачать
How to make a FABRIK IK solver with rotation constraints mintyleaf 16:23 2 years ago 4 146 Далее Скачать
FABRIK Inverse Kinematics Implementation in 3D with Joint Constraints r3dux 2:41 10 years ago 9 164 Далее Скачать
FABRIK: Inverse Kinematics with constraints Sebastian Eduardo Chaparro 0:54 7 years ago 365 Далее Скачать
Inverse Kinematics - FABRIK - Skeleton with collisions and constraints anthichriste 0:21 4 years ago 146 Далее Скачать
Visual Components - Human Inverse Kinematics (FABRIK algorithm) work with Process Modeling idkfa 0:14 1 year ago 244 Далее Скачать
Inverse Kinematics - FABRIK - Skeleton with constraints anthichriste 0:21 4 years ago 182 Далее Скачать
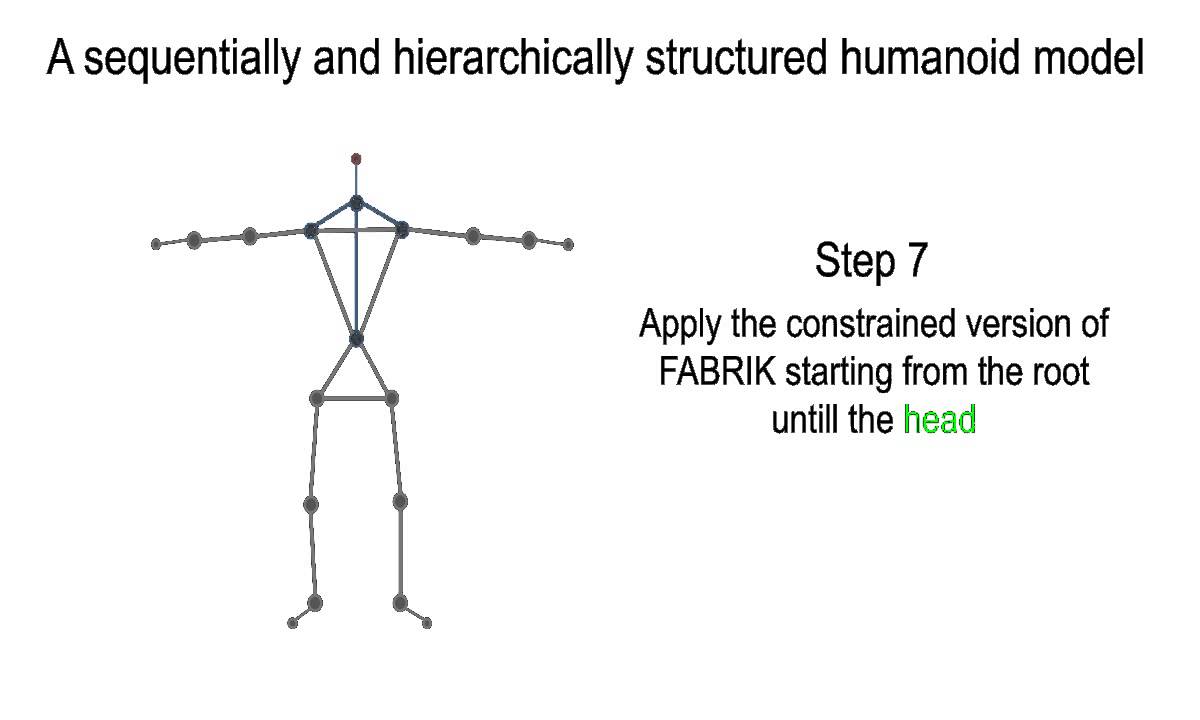
Forward And Backward Reaching Inverse Kinematics (FABRIK) Andreas Aristidou 3:57 10 years ago 26 251 Далее Скачать
Visual Components - Human Inverse Kinematics - FABRIK Algorithm idkfa 0:58 1 year ago 373 Далее Скачать
Numerical Inverse Kinematics Using the FABRIK Method Engineering Educator Academy 26:07 3 years ago 2 058 Далее Скачать